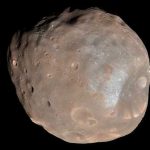
Bevor der MMX-Rover die ersten Zentimeter auf Phobos zurücklegen kann, wird er bei der Landung sein ganzes Können zeigen müssen: Das MMX-Mutterschiff wird den Rover in einer Höhe von etwa 50 Metern ausklinken. Im langsamen freien Fall schwebt der Rover Phobos entgegen. Die Eigenschaften der Mondoberfläche sind im Detail noch unbekannt, aber es ist wahrscheinlich, dass der Rover mehrmals vom Boden abprallt und sich überschlägt, bevor er schließlich liegenbleibt.

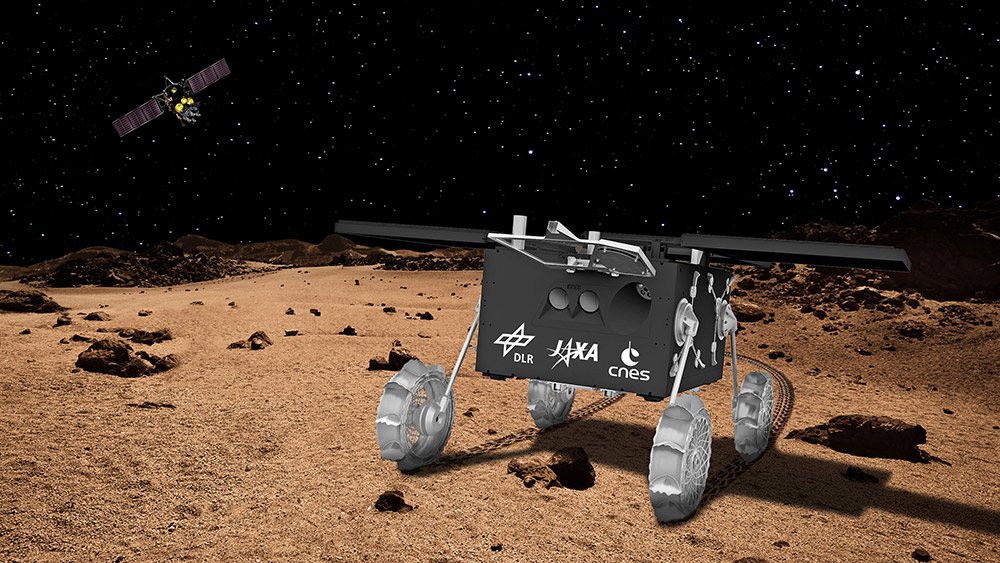
Egal in welcher Position dies sein wird, der MMX-Rover ist so konstruiert, dass er sich mit den Beinen seines Fortbewegungssystems autonom mit der korrekten Seite nach oben aufrichtet. Dies ist entscheidend, damit er danach seine Solarpanels entfalten, diese zur Sonne hin ausrichten und seine Batterie aufladen kann. Dann kann die Erkundung des Marsmondes Phobos beginnen.
Mit 3D-Sicht und Radkameras
Die Bilder, die uns dann erwarten, werden von insgesamt vier Kameraköpfen bereitgestellt. Zwei Navigationskameras blicken nach vorne und erlauben eine 3D-Darstellung des Terrains vor dem Rover. Mit diesen Bildern können die Wissenschaftlerinnen und Wissenschaftler Hindernisse erkennen und die Fahrtroute detailliert planen. Anhand der 3D-Daten soll der Rover vollautonom vor Hindernissen stoppen oder diese sogar umfahren. Außerdem eignen sich die räumlich hochaufgelösten Bilder sehr gut für geologische Analysen.
Die anderen beiden Kameras, genannt „Wheelcams“, befinden sich unter dem Rover. Diese blicken auf die Kontaktbereiche der beiden linken Räder und erfassen Spurtiefe, Profilabdruck und wie beim Fahren das Bodenmaterial bewegt wird. Das erlaubt Rückschlüsse auf die Bodenbeschaffenheit. Die beiden Radkameras können kurze Filmsequenzen aufnehmen, um das Fahrverhalten genau zu analysieren.
Mit Millimetern pro Sekunde über den Marsmond
Rund 100 Tage soll der Rover auf dem Mond unterwegs sein. Zentimeter für Zentimeter könnte er eine Strecke von bis zu 100 Metern erkunden. Das klingt zunächst nach nicht viel, ist aber aufgrund der durch die Schwerkraft limitierten Fahrgeschwindigkeit eine enorme Herausforderung für das kleine vierrädrige Gefährt. Sicher werden Steine in der Landeumgebung liegen, die aufwändig umfahren werden müssen. Aufgrund der extrem geringen Gravitation wird dies zum Balanceakt. Jedes zu schwungvolle Manöver könnte den Rover abheben lassen – mit unkalkulierbaren Folgen.
So wird die Fahrgeschwindigkeit am Anfang weniger als einen Millimeter pro Sekunde betragen, kann aber bei wachsender Erfahrung mit dem Terrain auf rund einen Millimeter pro Sekunde gesteigert werden. Mögliche Bodeneigenschaften und ihre jeweiligen Auswirkungen auf das Fahrverhalten wurden am DLR-Institut für Systemdynamik und Regelungstechnik durch eine eigens entwickelte Physiksimulation vorab analysiert.
Autonomes Fahren und drastische Temperaturwechsel
Zusätzliche Schwierigkeiten für den MMX-Rover stellen die große Entfernung zum Mars und der komplexe Funkweg über das Mutterschiff dar. Die Signallaufzeit vom Rover über das Mutterschiff zur Erde und zurück wird rund zwei Tage betragen. Entsprechend müssen die Forschungsteams in den beiden Kontrollzentren beim CNES in Toulouse und beim DLR in Köln jeweils Fahrsequenzen programmieren, die der Rover selbstständig ausführen kann.
Klappt alles, wird er der weltweit erste Rover auf einem kleinen Körper mit geringer Schwerkraft sein, der zudem eine längere Strecke erkundet. Hinzu kommen andere widrige Bedingungen: Während eines „Phobos-Tages“ von knapp acht Stunden schwankt die Temperatur am Rover zwischen minus 150 und plus 50 Grad Celsius. Dieser Temperaturwechsel geschieht dazu noch sehr schnell, denn drei Tage auf Phobos entsprechen einem Tag auf der Erde. Deshalb muss der Rover so konstruiert sein, dass die Temperatur in seinem Inneren in einem verträglichen Bereich gehalten wird, damit die Elektronik geschützt wird.