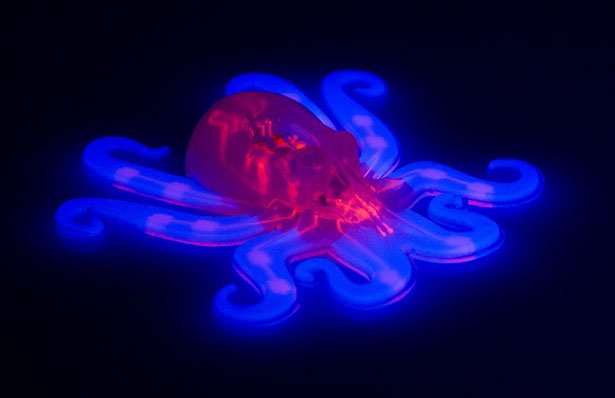
Von der Natur abgeschaut: Er sieht aus wie ein Oktopus – und funktioniert auch sehr ähnlich. Forscher haben erstmals einen autonomen Soft-Roboter konstruiert, der ohne metallische Teile oder externe Stromversorgung auskommt. Stattdessen bewegt und steuert er sich allein durch Druckunterschiede seines chemischen „Blutes“. Dieser „Oktobot“ könnte Vorreiter für einen neuen Typ von autonomen Softbots sein, so die Forscher im Fachmagazin „Nature“.
Die klassischen Roboter sind Maschinenwesen – sie bestehen aus Metall und werden meist elektrisch angetrieben. Doch in jüngster Zeit haben Forscher auch natur-ähnlichere Varianten konstruiert. Diese Softbots bestehen aus weichem Gummi und sind enorm robust. Zudem bewegen sie sich – ähnlich wie viele wirbellose Tiere – durch Druckunterschiede in ihrem Inneren.
Komplett weich – ohne Batterie oder Kabel
Doch alle bisherigen Softbots haben eines gemeinsam: Für ihr „Gehirn“ und zur Stromversorgung benötigen sie noch immer steife Bauteile aus Metall oder aber sie hängen an Kabeln und bekommen Strom und Befehle von außen. „Die Vision für die Soft-Robotik ist schon seit langem, komplett weiche, flexible Roboter zu konstruieren“, erklärt Studienleiter Robert Wood von der Harvard University.
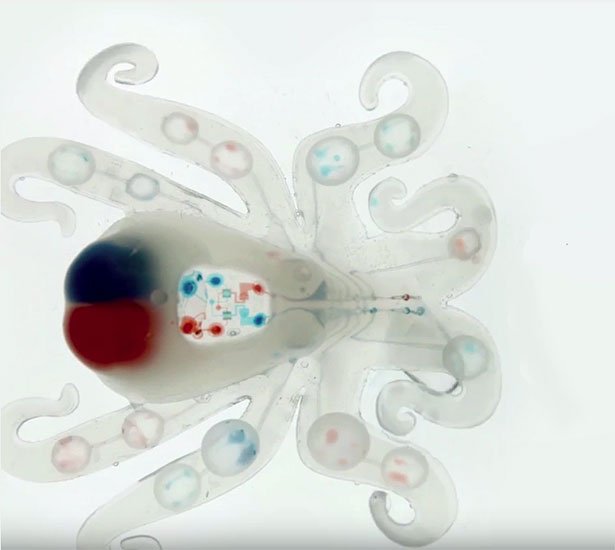
Einen solchen komplett „soften“ Roboter haben Wood und seine Kollegen nun entwickelt und mittels 3D-Druck produziert – nach einem natürlichen Vorbild. Denn der kleine Softbot sieht aus wie ein durchsichtiger Oktopus. Sein Körper besteht vollständig aus einem flexiblen, transparenten Kunststoff. In seinem Rumpf sitzt eine in den Kunststoff integrierte Kombination aus Treibstofftank und Steuerzentrale.
Wasserstoffperoxid als Treibstoff
Angetrieben und gesteuert wird der „Oktobot“ durch ein raffiniertes Wechselspiel von pneumatischem Druck und Chemie. Als Treibstoff dient ihm Wasserstoffperoxid, das der Roboter in zwei kleinen Tanks mit sich trägt. „Das Wunderbare an Peroxid ist, dass eine einfache Reaktion mit einem Katalysator – in diesem Falle Platin – es zu einer Kraftquelle macht“, erklärt Woods Kollege Michael Wehner.
Bei Kontakt mit Platin reagiert das Peroxid zu Wasser und gasförmigem Sauerstoff. Dadurch vergrößert sich das Volumen dieses Treibstoffs schnell auf das 160-Fache. Über einen Kanal im Kunststoff bläst das Gas jeweils zwei Beinpaare des Oktobot auf und bewegt sie dadurch. Gleichzeitig schließt der Gasdruck die Leitung des ersten Treibstofftanks und öffnet die des zweiten – jetzt läuft der gesamte Prozess erneut ab, nur seitenverkehrt.
„Er ist erst der Anfang“
Noch kommt der kleine Oktobot mit seinen Beinbewegungen nicht wirklich vorwärts. Aber er ist auch nur ein erster Anfang, wie die Forscher betonen. „Er demonstriert, dass wir die Schlüsselkomponenten eines einfachen, komplett weichen Soft-Roboters herstellen können“, sagt Wood. „Das liefert die Basis für komplexere Entwürfe.“
Das nächste Modell des Oktobots ist bereits in Arbeit. Dieser Soft-Roboter soll dann bereits kriechen, schwimmen und sogar mit seiner Umwelt interagieren können. Die Wissenschaftler sehen in solchen Softbots einen vielversprechenden Weg, um besonders robuste, einfache Roboter zu erhalten. „Wir hoffen, dass unser Ansatz Robotiker, Materialforscher und andere Wissenschaftler inspiriert“, sagt Koautor Ryan Truby von der Harvard University.
Das könnte vielleicht gar nicht nötig sein. Denn längst arbeiten auch andere Forschergruppen an Softbots, die von der Natur abgeguckt sind – oder sogar Teile von Lebewesen nutzen: Erst vor Kurzem stellten Wissenschaftler einen Roboterrochen vor, der tierische Muskelzellen als Antrieb nutzt. (Nature, 2016; doi: 10.1038/nature19100)
(Harvard University, 25.08.2016 – NPO)














