Wendig dank Schabenpanzer: Ein sechsbeiniger Roboter nutzt einen raffinierten Trick, um enge Passagen zu überwinden: Er kippt sich seitwärts und krabbelt auf der Schmalseite seines rundlichen Rückenschilds durch die Lücke – und das ohne spezielle Programmierung oder Sensoren. Abgeschaut haben sich die Roboter-Forscher diesen praktischen Hilfseffekt des Rückenpanzers bei lebenden Vorbildern: den Schaben.
Roboter lernen immer besser, auch mit schwierigem Gelände und sogar Verletzungen fertig zu werden. So trotzt der „Softbot“ selbst Feuer, Wasser und starkem Druck, andere Roboter rennen wie eine Katze oder ahmen die Strategien von Vögeln und Insekten nach.
Die meisten Roboter überwinden Hindernisse auf ihrem Weg bisher dadurch, dass sie ausweichen und sie zu umgehen versuchen. „Wenn das Terrain aber sehr unwegsam ist und nur kleine Lücken zwischen den Hindernissen existierten, dann stößt dieser Ansatz auf seine Grenzen“, erklärt Erstautor Chen Li von der University of California in Berkeley. Denn es gelingt dem Robotergehirn dann nicht mehr, eine neue Route zu berechnen – es ist schlicht zu wenig Platz.
Schaben mit Roll-Trick
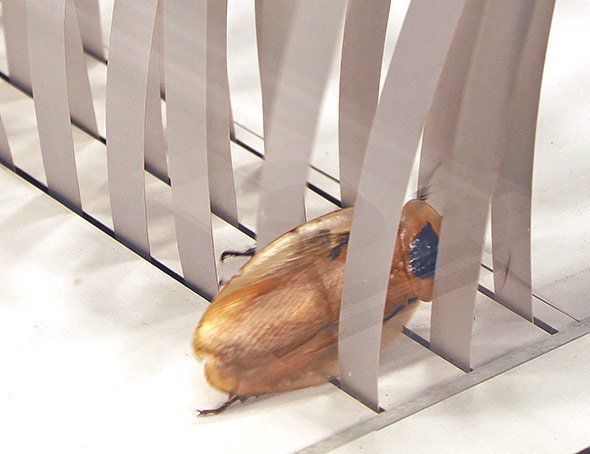
discoidalis. Ihr Kopf und Rücken sind von einem flachen, aber breiten ovalen Schild geschützt. Wenn diese Schaben auf dem Boden des Regenwalds umherlaufen, müssen sie sich häufig durch enge Lücken zwischen Pflanzenstengeln, Pilzen und anderen Hindernissen zwängen.
Wie die Forscher beobachteten, gelingt den Insekten dies mit einem raffinierten Roll-Trick: Sie kippen sich einfach auf die Seite und krabbeln dann durch die Lücke. Wie Experimente zeigten, spielt dabei die ovale, flache Form des Rückenschilds die entscheidende Rolle – ihr abgerundeter Vorderrand bringt die Insekten quasi von selbst in die richtige Position.
Rückenpanzer hilft Roboter beim Zwängen
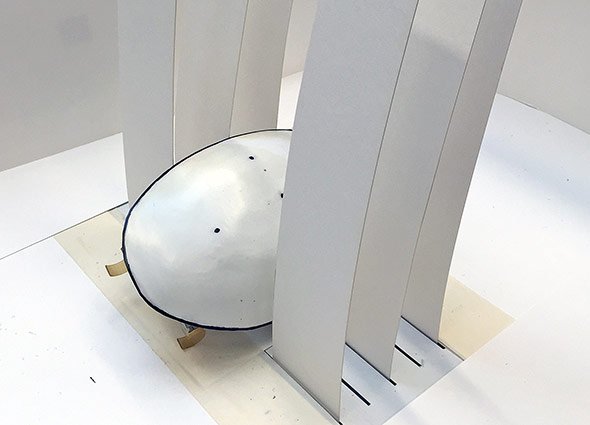
Li und seine Kollegen haben sich dies für ihre Roboter zunutze gemacht. Sie statteten einen ganz kleinen, sechsbeinigen Laufroboter mit einem ovalen Rückenpanzer aus, der dem der Schaben stark ähnelte. Ansonsten aber bleib der Roboter unverändert – auch an seiner Programmierung änderten die Forscher nichts. Diesen Roboter ließen sie dann auf ein Hindernis aus mehreren eng stehenden Stäben zulaufen.
Nun passierte Erstaunliches: Der kleine Roboter fackelte nicht lange, sondern begann, sich durch eine der Lücken zu zwängen. Dabei kippte er ganz von allein auf die Seite und bewegte sich seitwärts weiter, indem er sich mit den Beinen von einem der Stäbe abstieß. „Dies demonstriert, dass unser Roboter grasähnliche Hindernisse überwinden kann, ohne zusätzliches Feedback oder Veränderungen in der Motorkontrolle“, sagen die Forscher. Entscheidend sei nur die dünne, abgerundete Hülle, die es dem Roboterkörper erlaubte, sich seitwärts zu rollen.
„Dieser Effekt ist das Äquivalent zu den stromlinienförmigen Formen, die bei Vögeln, Fischen und Flugzeugen den Luftwiderstand verringern“, erklärt Li. „Wir nennen dies terradynamisches streamlining.“ Die Forscher vermuten, dass es noch andere Formen geben könnte, die Robotern je nach Terrain beim Klettern oder Laufen helfen. Würde man Roboter damit ausstatten, könnte das ihre Nützlichkeit und Reichweite ohne zusätzliche Sensoren oder Programmierung verbessern. „Unser nächster Schritt ist es daher, nach weiteren Varianten solcher terradynamischcer Formen zu suchen“ so Li. (Bioinspiration Biomimetics, 2015; doi: 10.1088/1748-3190/10/4/046003)
(Institute of Physics, 24.06.2015 – NPO)














