Für die Ingenieure von ROBEX sieht es nicht so gut aus: Immer wieder fegen Sturmböen mit über 50 Kilometern in der Stunde über die Mond-Ersatzlandschaft. Die Windstöße wirbeln Staubwolken auf und drücken auf den Roboterarm, mit dem der LRU-2 nach den Sensorboxen greift.
{1l}
Kurz vor dem Missionsende geht dann gar nichts mehr: Der Windmesser am Lander zeigt Werte über 100 Kilometer in der Stunde. Selbst unter den Containern weht der Sturm den Untergrund zur Seite. Der Lander wird mit Gurten gesichert, damit die Klappen der Ladebuchten sich nicht öffnen und beschädigt werden. Der Rover bleibt in der „Garage“. Auf dem Mond gibt es keine Windstöße, der Ätna hat an diesem Tag hingegen reichlich davon.
Zwangspause kurz vor Schluss
Was fixiert werden kann, wird fixiert. Dann fahren die Teams wieder zur Küste zurück, wo die Sonne mit über 30 Grad Celsius die Touristen in T-Shirts, Shorts und Flip-Flops® schwitzen lässt. Schritt für Schritt ist man der Autonomie immer näher gekommen, jetzt spielt das Wetter nicht mehr mit. Zwangspause für Team, Rover und Lander.
Zu diesem Zeitpunkt ist die Frustration groß. Niemand weiß, ob die letzten Tage noch die Gelegenheit geben werden, die Mission durchzuspielen. Eigentlich wollte man geladenen Gästen demonstrieren, wie erfolgreich die Technologien eingesetzt werden können. Den Rover mit seiner autonomen Navigation. Den Lander als Kommunikationsgarant. Die Sensorboxen mit ihren empfindlichen Instrumenten. Und das Gerät zum induktiven Laden des Rovers.
Hätten an diesem Abend alle gewusst, dass ein paar Tage später alles anders aussehen wird, wäre die Stimmung besser gewesen. Die Wettervorhersagen werden immer wieder über Handys abgerufen. Nur wenn der Wind sich legt, können Rover und Lander wieder aktiviert werden.
Mission accomplished!
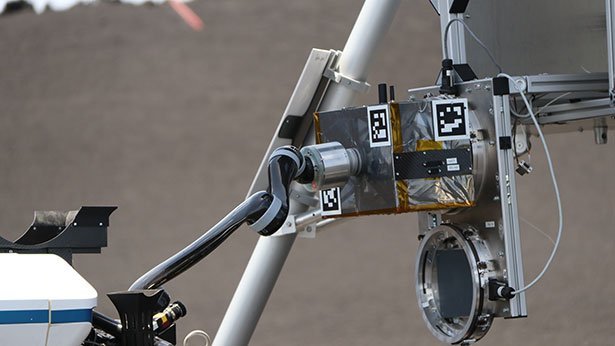
Schließlich ist es so weit: Der Wind lässt etwas nach, die Sonne sorgt sogar für erträgliche Temperaturen auf dem Berg. Lander RODIN und Rover LRU-2 verzichten auf ihre Launen. Zielstrebig fährt LRU-2 auf den Lander zu, fixiert ihn und parkt zielsicher rückwärts vor der Ladebucht ein. Sein Roboterarm fährt aus und bewegt sich auf einer selbst berechneten Bahn auf die Sensorbox zu.
Dann schließt sich der Greifmechanismus um den Anschlussring, dockt die Box ab und der Roboterarm legt seine Nutzlast präzise auf dem Rücken des Rovers ab. Knirschend geht es über den Lava-Boden, um die erste Sensorbox am vorgegebenen Ort abzulegen. Am Ende hat das ROBEX-Team das Glück des Tüchtigen. Es verlässt den Ätna, kehrt heim vom Mond …
Manuela Braun /DLR-Magazin
Stand: 10.11.2017