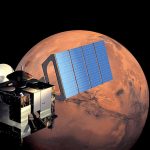
Bevor der MMX-Rover die ersten Zentimeter auf Phobos zurücklegen kann, wird er bei der Landung sein ganzes Können zeigen müssen: Das MMX-Mutterschiff wird den Rover in einer Höhe von etwa 50 Metern ausklinken. Im langsamen freien Fall schwebt der Rover Phobos entgegen. Die Eigenschaften der Mondoberfläche sind im Detail noch unbekannt, aber es ist wahrscheinlich, dass der Rover mehrmals vom Boden abprallt und sich überschlägt, bevor er schließlich liegenbleibt.

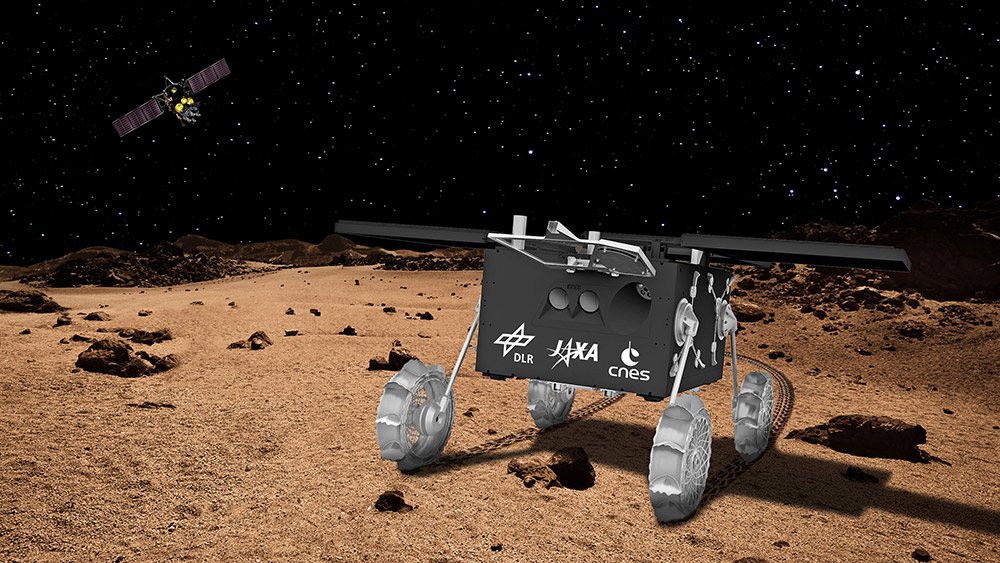
Egal in welcher Position dies sein wird, der MMX-Rover ist so konstruiert, dass er sich mit den Beinen seines Fortbewegungssystems autonom mit der korrekten Seite nach oben aufrichtet. Dies ist entscheidend, damit er danach seine Solarpanels entfalten, diese zur Sonne hin ausrichten und seine Batterie aufladen kann. Dann kann die Erkundung des Marsmondes Phobos beginnen.
Mit 3D-Sicht und Radkameras
Die Bilder, die uns dann erwarten, werden von insgesamt vier Kameraköpfen bereitgestellt. Zwei Navigationskameras blicken nach vorne und erlauben eine 3D-Darstellung des Terrains vor dem Rover. Mit diesen Bildern können die Wissenschaftlerinnen und Wissenschaftler Hindernisse erkennen und die Fahrtroute detailliert planen. Anhand der 3D-Daten soll der Rover vollautonom vor Hindernissen stoppen oder diese sogar umfahren. Außerdem eignen sich die räumlich hochaufgelösten Bilder sehr gut für geologische Analysen.
Die anderen beiden Kameras, genannt „Wheelcams“, befinden sich unter dem Rover. Diese blicken auf die Kontaktbereiche der beiden linken Räder und erfassen Spurtiefe, Profilabdruck und wie beim Fahren das Bodenmaterial bewegt wird. Das erlaubt Rückschlüsse auf die Bodenbeschaffenheit. Die beiden Radkameras können kurze Filmsequenzen aufnehmen, um das Fahrverhalten genau zu analysieren.