Rettung in Sicht: Forscher haben einen Plan ausgetüftelt, der den feststeckenden Bohrer der Raumsonde Mars InSight wieder in Gang bringen könnte. Der Roboterarm der Sonde soll erst das Gehäuse des „Mars-Maulwurfs“ hochheben und dann dem Bohrer den nötigen Gegendruck verleihen. Denn Tests mit Modellen des Bohrers legen nahe, dass ein zu loser Untergrund und mangelnder Halt seinen Fortschritt hemmt.
Das Experiment H3 – Spitzname „Maulwurf“ ist das Kernstück der Marssonde InSight. Dieser selbstschlagende Bohrhammer sollte erstmals bis zu fünf Meter tief in den Marsuntergrund eindringen und wertvolle Daten über Wärmeverteilung und Beschaffenheit des Marsinneren liefern. Doch nach der Landung der Sonde und einem vielversprechenden Anfang der Bohrtätigkeit gab es plötzlich Probleme: Der Bohrer blieb in 30 Zentimetern Tiefe stecken und kam nicht mehr voran.
Zu wenig Reibung?
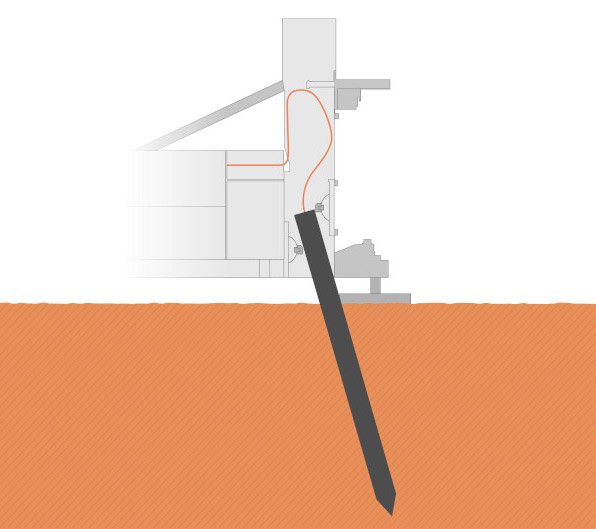
Das Problem: Weil ein Gehäuse den Bohrer verdeckt, verraten auch Aufnahmen der Sondenkamera wenig darüber, warum der Bohrer nicht weiterkommt. Anhand von Tests mit Kopien des „Maulwurfs“ haben die Ingenieure des InSight-Projekts jedoch eine erste Vermutung: „Wir denken, dass die aktuellen Schwierigkeiten am wahrscheinlichsten einem Mangel an Reibung im Mars-Regolith geschuldet sind“, erklärt Troy Hudson vom Jet Propulsion Laboratory der NASA.
Seitlicher Halt und Reibung sind wichtig für den Bohrer, weil sein bei jedem Schlag erzeugter Rückstoß durch Reibung am Boden aufgefangen werden muss – sonst hämmert er auf der Stelle und dringt nicht weiter in die Tiefe vor. Unter irdischen Bedingungen funktioniert diese Bohrstrategie problemlos. In der geringeren Marsschwerkraft jedoch ist die Reibung im Untergrund offenbar zu schwach.
Das Gehäuse muss weg
Jetzt könnte es jedoch eine Lösung für den Mars-Maulwurf geben – und einen Weg, die vermutliche Ursache zu bestätigen. „Wir wollen die Stützstruktur anheben, weil wir den Maulwurf unter der Hülle bisher nicht sehen können und so auch nicht genau wissen in welcher Situation er sich befindet“, erklärt Tilman Spohn, wissenschaftlicher Leiter des HP3-Experiments vom Deutschen Zentrum für Luft- und Raumfahrt (DLR).
Der Roboterarm der Marssonde soll Ende Juni damit beginnen, die Abdeckung des Bohrers unter Kamerakontrolle schrittweise anzuheben. Mit dem behutsamen Vorgehen wollen die Ingenieure sicherstellen, dass der Bohrer nicht durch verhakte Federn versehentlich mit herausgezogen wird. „Falls das passiert, können wir sie nicht wieder zurück in ihr Loch setzen oder sie anderweitig direkt mit dem robotischem Arm anheben. Also heben wir die Stützstruktur nach und nach an und prüfen, dass der Maulwurf nicht mitkommt“, erklärt Troy.
Roboterarm als Gegendruck-Geber
Ist die Hülle dann entfernt, soll der Roboterarm für zusätzlichen Gegendruck sorgen: „Wir planen den Roboterarm zu nutzen, um nah am Maulwurf auf den Boden zu drücken“, erklärt Spohn. „Durch die zusätzliche Last erhöht sich der Druck auf den Maulwurf und damit die Reibung an seiner Außenwand. Unsere Berechnungen zeigen, dass wir nahe an das Gerät heranmüssen. Unmittelbar über dem Maulwurf und nahe dran ist die Wirkung am größten.“
Das Abheben der Bohrerhülle könnte auch dann hilfreich sein, wenn der Bohrer feststeckt, weil er einen Stein getroffen hat. Eigentlich kann die Rammsonde zwar kleinere Steine einfach wegdrücken. Sollte sich aber ein Stein zwischen Bohrer und Stützgerüst verklemmt haben, könnte dies den Vortrieb des Bohrers blockieren, wie die Forscher erklären. Wenn nun das Stützgerüst entfernt wird, sollte dieses Problem wegfallen – falls dies der Grund für die Blockade ist.
Die Lösung des Bohrproblems wäre für die InSight-Mission entscheidend. Zwar hat die Marssonde schon wertvolle Daten gesammelt und übermittelt, darunter das Geräusch des marsianischen Windes und das erste eindeutige Marsbeben. Ihre Kernaufgabe aber ist es, erstmals Informationen über das tiefe Innere des Roten Planeten zu liefern – und dafür benötigt sie einen funktionierenden Bohrer.
Quelle: Deutsches Zentrum für Luft- und Raumfahrt (DLR), NASA Jet Propulsion Laboratory