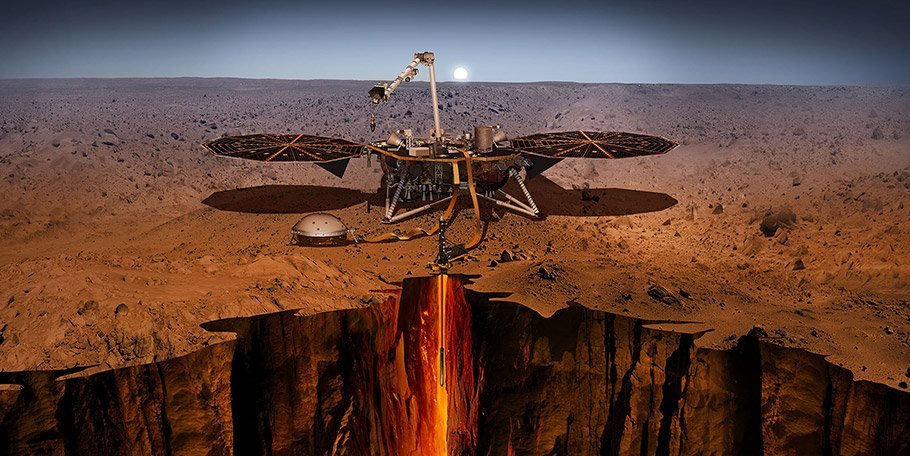
Leichter Druck als Bohrhilfe: Ein neuer Ansatz soll den festsitzenden Bohrer der Marssonde InSight wieder in Gang bringen. Dabei wird die Schaufel des Roboterarms seitlichen Druck auf den Mars-„Maulwurf“ ausüben, während dieser wieder anfängt zu bohren. Dies könnte dem Bohrer den nötigen Gegendruck verleihen, um tiefer in den Marsuntergrund eindringen zu können. Ob der Plan gelingt, wird sich in den nächsten Wochen zeigen.
Die NASA-Sonde Mars InSight sollte die erste sein, die mehrere Meter tief in den Marsuntergrund bohrt. Ihre Kombination aus Bohrhammer und Temperatursensor sollte erstmals ein genaueres Bild der Wärmeverteilung und Beschaffenheit des Marsinneren liefern. Doch es gab Probleme: Der Bohrkammer konnte nur rund 35 Zentimeter tief in den Boden eindringen, dann blieb er stecken.
Erst zu locker, dann zu fest
Doch warum? Das enthüllte der Roboterarm der Sonde, als er im Juni 2019 das Gehäuse des Bohrers abhob: „Bei einer Tiefe von 35 Zentimetern hatte der Maulwurf die Führungsfedern des Gehäuses verlassen und sich dann aufgrund unzureichender Bodenreibung im Kreis gedreht, ohne weiter vorzudringen“, erklärt Tilman Spohn vom Deutschen Zentrum für Luft- und Raumfahrt (DLR). Rund um den Bohrer war ein kleiner Krater aus lockerem Gestein entstanden, wodurch die kleine Rammsonde zu wenig seitliche Reibung erfuhr, um tiefer einzudringen.
„Es zeigte sich, dass offenbar eine feste Kruste von etwa zehn Zentimetern zementierten Sands über recht lockerem Sand liegt“, sagt Spohn. Im Juli und August 2019 folgten Versuche, das Loch um den Marsmaulwurf mit der flachen Schaufel und dann mit der Spitze der Schaufel des robotischen Arms einzudrücken. Doch die Kruste stellte sich als zu hart und widerstandsfähig heraus.
Druck von der Seite als Bohrhilfe
Jetzt wollen die NASA und das DLR einen weiteren Versuch starten. Dabei soll der Roboterarm den Mars-Bohrer seitlich gegen die Wand des Bohrlochs drücken und ihm so mehr Halt verleihen. „Durch seitlichen Druck der Schaufel des robotischen Arms wollen wir versuchen, ihm die fehlende Reibung zu geben“, so Spohn. Der Marsmaulwurf funktioniert wie ein selbstschlagender Nagel, dessen Rückstoß durch Reibung aufgefangen werden muss.
In den kommenden Wochen wird dafür der Mars-„Maulwurf“ erneut aktiviert, unterstützt durch den seitlichen Druck des Arms. Dafür allerdings muss der Roboterarm Aktionen ausführen, die seine eingebauten Sicherheitsparameter überschreiten. „Wir werden den Arm anweisen, über seine vorgesehenen Parameter hinaus zu agieren“, sagt Ashitey Trebi-Ollennu vom Jet Propulsion Laboratory der NASA.
Für den Fall, dass auch diese Strategie den Mars-Bohrer nicht flott bekommt, denken die Forscher bereits über weitere Alternativen nach. So könnte man die Roboterarm-Schaufel einsetzen, um Oberflächenmaterial in das Loch zu kratzen und so den Krater aufzufüllen.
Quelle: NASA, Deutsches Zentrum für Luft- und Raumfahrt (DLR)