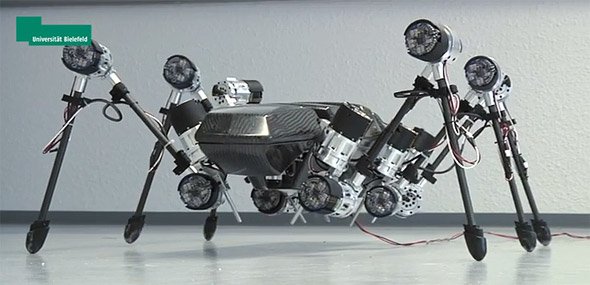
Elektronisches Krabbeltier: Der Roboter „Hector“ läuft wie eine Stabheuschrecke. Seine Gangart mit sechs voneinander unabhängig bewegbaren Beinen ist für Roboter bislang einzigartig. Dank der komplexen Steuerung kann der von deutschen Wissenschaftlern entwickelte Hector selbständig über Hindernisse klettern und kommt auch in unwegsamem Gelände zurecht. Und nicht nur Laufen wie ein Insekt kann der Roboter – bald sollen auch Sehen und Fühlen hinzukommen.
Die Natur liefert oft die besten Vorbilder – Wissenschaftler im Bereich der Bionik machen sich dies zunutze und imitieren natürliche Erfolgsmodelle mit technischen Mitteln. Besonders Insekten haben es den Bionikern offenbar angetan: So fliegen etwa Mini-Drohnen nach der Art von Stubenfliegen, und Holzwespen lieferten bereits die Vorlage für einen neuen Bohrer. Wissenschaftler um Axel Schneider von der Universität Bielefeld haben sich für ihren sechsbeinigen Roboter von der Stabheuschrecke inspirieren lassen – allerdings ist „Hector“ mit fast einem Meter rund 20-mal größer als das Insekt.
Antrieb wie mit biologischen Muskeln
Genau wie die Stabheuschrecke hat Hector ein extrem leichtes Außenskelett, das jedoch statt aus Chitin aus kohlefaserverstärktem Kunststoff besteht. Hinzu kommen sogenannte passiv-elastische Gelenke, die den Antrieb des Roboters bilden. „Die Elastizität in Hectors Antrieben ist in ihrer Wirkung vergleichbar mit der von Muskeln in biologischen Systemen“, erklärt Schneider. Der Heuschrecken-Roboter besitzt insgesamt 18 dieser von den Forschern selbst entwickelten Gelenkantriebe, drei davon an jedem Bein. Damit kann er sich beim Laufen flexibel an die jeweilige Beschaffenheit des Bodens anpassen.
„Die Elastizität allein reicht aber nicht aus, damit Hector in einer natürlichen Umgebung mit Hindernissen laufen kann“, so Schneider. Die meisten sechsbeinigen Roboter stehen jeweils auf drei Beinen, während sie die anderen drei Beine vorwärts bewegen. Hector beherrscht diese Gangart ebenfalls, er kann aber noch mehr: Jedes seiner Beine kann sich unabhängig von den anderen bewegen. Das lässt den Roboter auch in kompliziertem Gelände vorankommen.






