Premiere unter Hochdruck: Zum ersten Mal ist ein Soft-Roboter in die Tiefen des Marianengrabens getaucht – zum tiefsten Punkt der Erde. Der aus weichem Polymer bestehende Roboter ist einem Tiefsee-Fisch nachempfunden und bewegt sich mit flügelähnlichen Flossen vorwärts. Obwohl er keinerlei Druckkapseln oder andere Schutzhüllen besitzt, überstand er den Tauchgang in 10.900 Meter Tiefe problemlos, wie Forscher im Fachmagazin „Nature“ berichten.
Die Tiefsee und vor allem die Tiefseegräben gehören zu den letzten kaum erforschten Bereichen unseres Planeten. Der enorme Druck in tausenden Meter Wassertiefe macht es schwer, diese dunklen, kalten Gefilde näher zu erkunden. Tauchboote und Unterwasserroboter müssen durch dicke Stahlwände und Techniken des Druckausgleichs geschützt werden. Die Natur hat sich dagegen auch ohne solche Schutzpanzer an die Extrembedingungen angepasst: Selbst in den Tiefen des Marianengrabens gibt es Mikroben, Krebse und andere Meeresbewohner.
Tiefseefisch als Vorbild
Jetzt hat ein Roboter nach Vorbild dieser Tiefseebewohner seine Premiere im Marianengraben gegeben: Forscher um Guorui Li von der Zhejiang University in China haben erstmals einen Softroboter konstruiert, der ohne metallene Panzerung dem Wasserdruck in mehr als 10.000 Meter Tiefe standhält. Vorbild für den fischähnlichen, gut 20 Zentimeter langen Roboter war der im Marianengraben lebende Tiefseefisch Pseudoliparis swirei.
Dieser kaulquappenähnliche, bis zu 20 Zentimeter lange Tiefseefisch wurde bis in 8.100 Meter Tiefe beobachtet und gilt damit als die am tiefsten vorkommende Fischart weltweit. „Der Bauplan dieses Fisches umfasst einen geteilten, teilweise offenen Schädelknochen und flügelartig schlagende Brustflossen – daran haben wir das mechanische Design unseres Tiefsee-Softroboters ausgerichtet“, erklären die Forscher.
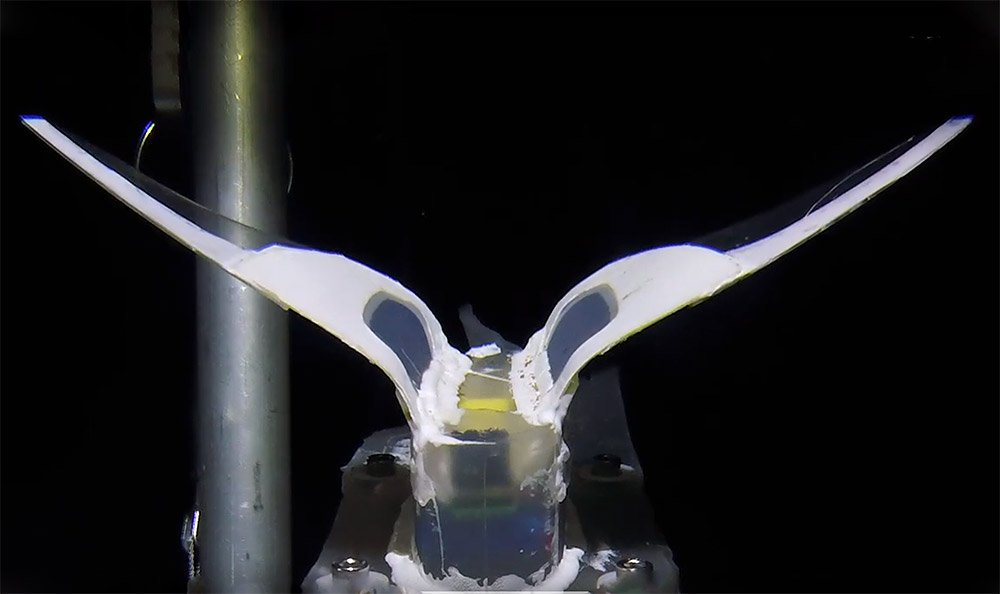
Wie der Fisch besitzt der Softroboter zwei flügelähnliche Flossen, durch deren Auf- und Abbewegung er sich durch das Wasser bewegt. Angetrieben werden die Flossen durch Muskeln aus einem dielektrischen Elastomer – einem weichen Kunststoff mit integrierten flexiblen Elektroden, der sich durch wechselnde elektrische Spannung dehnt oder zusammenzieht. Die Vorderkante der Flügelflossen besteht aus einem etwas festeren Polymer, der hintere Teil aus einer dünnen Silikonfolie.
Seine Widerstandsfähigkeit gegenüber dem hohen Wasserdruck bekommt der Softroboter durch zwei Designmerkmale: Zum einen ist seine Polymermatrix aus Silikon porös und weich genug, um sich ähnlich wie die Gewebe der Tiefseebewohner an den Wasserdruck anzupassen. Auch das Elastomer der „Muskeln“ haben die Forscher so ausgewählt, dass es bei hohem Druck nur einen Teil seiner Kontraktionsfähigkeit verliert.
Dezentrale Elektronik
Die zweite entscheidende Anpassung ist die Anordnung der Elektronik. „Wenn elektronische Bauteile auf einem einzigen Schaltkreis dicht aneinander liegen, dann kommt es bei hohem Druck zu Schäden an ihren harten Kontaktflächen“, erklären Li und sein Team. „Wir haben diese Scherbelastungen beseitigt, indem wir ein dezentrales Design nutzen. In diesem sind die Komponenten auf mehrere kleinere Platinen aufgeteilt und nur über Kabel verbunden.“
Seine Energie bekommt der Softroboter durch eine mit einem Transformator gekoppelte Lithium-Ionen-Batterie. Auch sie ist über flexible, in das Polymer eingegossene Kabel mit den restlichen Bauteilen verbunden. Durch seine autonome Stromversorgung und die integrierte Steuerung kann der Roboter sich eigenständig seinen Weg durch das Wasser bahnen. „Dieser selbstgetriebene Roboter macht feste, gepanzerte Vehikel überflüssig“, so die Forscher.
Tauchtest im Marianengraben
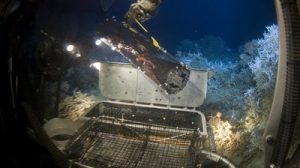
Seine praktische Eignung hat der Softroboter in mehreren Tests bewiesen – unter anderem im Marianengraben. Dafür brachte ihn ein klassisches Tauchfahrzeug zunächst bis in 10.900 Meter Tiefe – knapp über den Grund des Tiefseegrabens. Dort wurde der Softbot aktiviert und begann, mit seinen Flügelflossen zu schlagen. Trotz des enormen Drucks und seiner vergleichsweise weichen Flossen behielt der Roboter seinen Flossenschlag 45 Minuten lang bei, ohne dass Schäden oder Funktionsausfälle auftraten.
Bei einem weiteren Schwimmtest in gut 3.200 Meter Tiefe im südchinesischen Meer ließen die Forscher ihren Roboter eine längere Strecke freischwimmend zurücklegen und ermittelten sein Tempo: Mit nur gut fünf Zentimetern pro Sekunde ist er nicht gerade schnell. Doch die Wissenschaftler sind zuversichtlich, die Schwimmleistung und Manövrierfähigkeit ihres Softroboters noch weiter optimieren zu können.
„Basis für künftige Generationen von Tauchvehikeln“
„Dieser Softroboter kann selbst unter einem hydrostatischen Druck von 110 Megapascal noch frei schwimmen“, sagen Li und sein Team. „Das unterstreicht das Potenzial für die Nutzung weicher, leichter Geräte unter extremen Bedingungen.“ In einem begleitenden Kommentar bescheinigen auch Cecilia Laschi von der National University of Singapore und Marcello Calisti von der University of Lincoln dem Softroboter Potenzial:
„Die Arbeit von Li und Kollegen legt das Fundament für zukünftige Generationen von widerstandsfähigen und verlässlichen Vehikeln zur Tiefsee-Erkundung“, konstatieren sie. Solche Softroboter könnten dann eigenständig den Meeresboden erkunden und überwachen, Proben sammeln und bei der Säuberung der Meere helfen. „Grundsätzlich könnten sie Wissenschaftlern helfen, die weiten unkartierten Tiefen der Ozeane zu erforschen“, so Laschi und Calisti. (Nature, 2021; doi: 10.1038/s41586-020-03153-z)