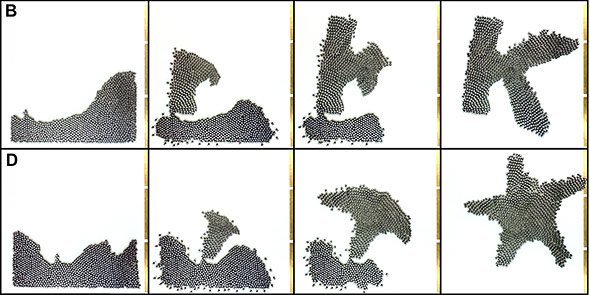
Schlau im Schwarm: US-Forscher haben den bisher größten Schwarm autonomer Mini-Roboter geschaffen. Die „Kilobots“ werden nur durch simpelste Sensoren und einen Algorithmus gesteuert, bilden aber im Schwarm selbstständig komplexe Formen aus. Dieser Tausend-Bot-Schwarm sei ein wichtiger Schritt hin zur Nachbildung der Schwarmintelligenz der Natur, konstatieren die Forscher im Fachmagazin „Science“.
In der Natur ist die Selbstorganisation von vielen einfachen Einheiten zu komplexen Gebilden ein alltägliches Phänomen – vom mehrzelligen Körper bis zu den Schwärmen von Vögeln oder Fischen reicht das Spektrum. In der Robotik wird versucht, diese Schwarmintelligenz technisch nachzuahmen: Einzelne Roboter erhalten dabei typischerweise nur wenige grundlegende Fähigkeiten – gehen, stoppen, Nachbarn erkennen und ähnliches. Ein Algorithmus gibt ihnen zudem einfache Handlungsanweisungen, die im Kollektiv umgesetzt dann zu einer Selbstorganisation des Schwarms führen.
Bisher allerdings umfassen die meisten Bot-Schwärme nur 10 bis 50 Roboter, nur wenige erreichen mehr als 100, wie die Forscher erklären. Das Problem liegt in den Kosten: Je mehr die Roboter können, desto teurer wird es, sie in großer Stückzahl herzustellen. Das aber bedeutet, dass Roboterforscher ihre Algorithmen zur Selbstorganisation bisher nicht in größerem Maßstab ausprobieren können. „Wir können das Verhalten großer Roboterschwärme zwar simulieren, aber die Aussagekraft solcher Simulationen hat Grenzen“, sagt Koautorin Radhika Nagpal.
{2}